
Ich habe mir ein Mikro-Brushless-Gimbal, d.h. ein Gimbal mit einem brushless Direkt-Antrieb für Kameras der 808 key chain Größe gebaut, welches ich hier vorstelle.
Das weltweit erste 3-Achsen Mikro-Brushless-Gimbal ist da!
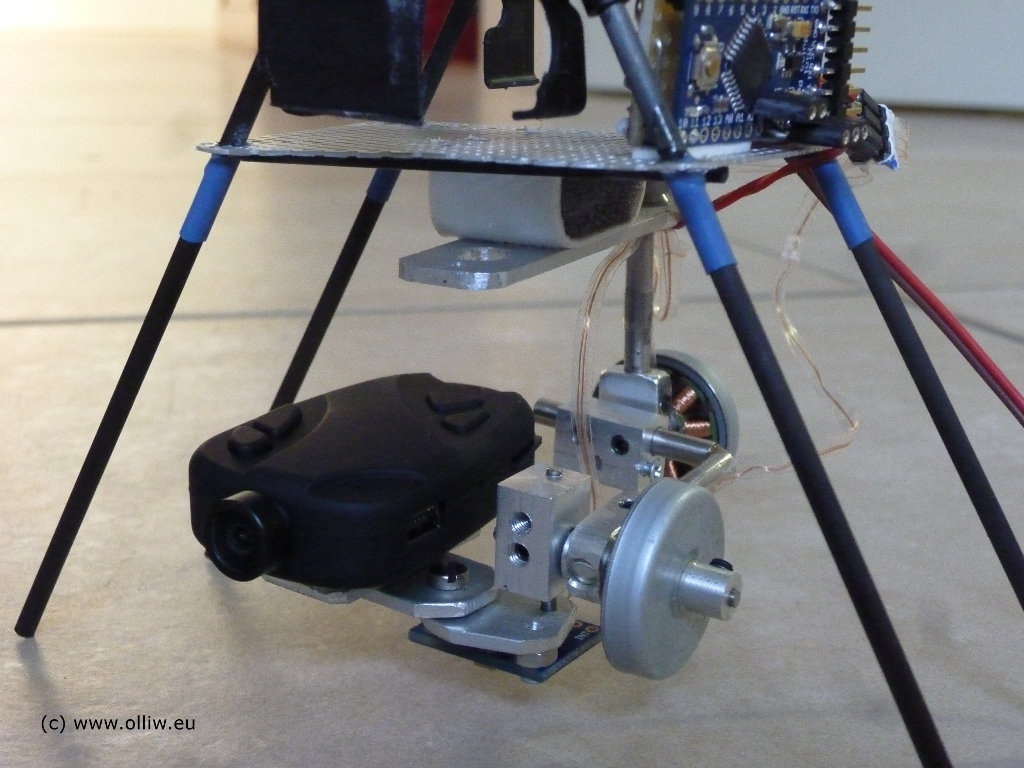
(Bild des ersten gut funktionierenden 2-Achsen Mikro-Brushless-Gimbals)
Kamera
Die Kamera ist eine key cam 808 #16 V2 mit Linse D. Alle weiteren Details sind auf ChuckLohr’s toller Webseite hier zu finden. Die Kamera is relativ günstig, und bietet meiner Meinung nach für den Preis eine sehr gute Videoqualität. Anders als die Vorläufer (#3 usw.) is sie auch sehr weit entwickelt, d.h. es gibt ein präzises Manual sowie ein Setupprogram, mit dem alle Einstellungen zum Kinderspiel werden.
Gimbal
Für das eigentliche Gimbal kam nur Material zum Einsatz wie man es in jedem Baumarkt findet. Die Herstellung der Motorhalter war der mechanisch schwierigste Teil. Naja, es ist nicht wirklich schwierig wenn die richtigen Werkzeuge zur Verfügung stehen, aber mir stehen sie eben nicht zur Verfügung. Mir gelang es nur weil ein Kollege Zugang zu einer Drehbank hatte, und ich an die ran durfte. Der Kamerahalter ist magnetisch, was auf’s Gewicht schlägt, aber er ist tierisch praktisch da dass An/Abbauen der Kamera dadurch super einfach ist.
Das Gesamtgewicht des ganzen Aufbaus wie er im Photo zu sehen ist, also Gimbal + Kamera + Kontroller + Kabel + Aufhängung + Landegestell, beträgt 90.5 g.
Motoren
Die Motoren sind m.M. nach entscheidend für’s ganze Projekt, und die Suche nach geeigneten Motoren war tatsächlich einer der größten Herausforderungen. Wenn Geld keine Rolle spielt dann finden sich ausgezeichnete Kandidaten bei Maxon (insbesondere die maxon EC flat Serie sieht vielversprechend aus). Ich habe jedoch, mit Hilfe einiger netter Kollegen, siehe hier, zunächst einige Mikro-Brushless-Motoren ausprobiert, aber alle wiesen ein viel zu starkes Rasten auf. Ich bin daher auf Disk-Motoren übergegangen, da der hier anstelle der einzelnen super-starken Magneten üblichwerweise verwendete gesinterte Magnetring das Rasten stark minimiert. Von den verschiedenen getesteten Diskmotoren fand ich diesen am Besten:
PS2 Slim disc drive Ersatzmotor
- 9n12p, Durchmesser 24 mm, Glockenhöhe 5.5 mm, Welle 2 mm
- originale Wicklung: 80 Windungen, ca. 0.17 mm Draht, ca. 4 Ohm
- neu Wicklung: Sternwicklung, 150 Windungen, 0.10 mm Draht, 24.1 Ohm (perfekt für 2S und 3S)
- Bronzelager ist durch ein Kugellager zu ersetzen, geeignete Halter müssen daher gefertigt werden
- Gewicht ist ca. 10-13 g
Kontroller
Als Kontroller habe ich den mini Brushless Gimbal Controller entworfen (alle Details hier). Der mBGC besteht aus einem Arduino Pro Mini und einem Erweiterungsboard, welches TC4427 oder TC4424 Motortreiber trägt. Er bietet zudem einen Spannungsteiler um die Batteriespannung zu messen, um z.B. eine Liposaver-Funktion zu realisieren oder um PID-Parameter der Spannung nachführen zu können.
Firmware
Die Firmware oBGC habe ich selbst entwickelt. Sie ist von Grund auf neu und in C mit AvrStudio geschrieben. Ich mag die Arduino-Hardware gerne, aber nicht die Arduino-Sprache; sie geht IMHO sehr fahrlässig mit Resourcen um, und gute Perfomance hängt halt dann doch oft mit effizientem Code zusammen. Die Firmware ist in einigen Aspekten recht weit entwickelt, aber in Anderen wie z.B. der RC-Steuerung hängt sie Alternativen noch hinterher.
Theoretischer Hintergrund
Im Laufe des Projekts bin ich auf einige Verhaltensweisen gestossen, welche ich zunächst überhaupt nicht verstanden hatte, und welche mich teils auch sehr überraschten. Daher habe ich mir einige eher theoretische Gedanken zum Gimbal gemacht; einige davon habe ich hier vorgestellt.
Flugerät
Das Gimbal ist im Moment für die Montage an einen Lama V4 Koaxialhelikopter ausgelegt, welcher gehörig getunt wurde: Er wurde mit einem GA250 Gyromixer und Turnigy 1811-2900 Motoren auf BLBL umgerüstet und läuft mit 3S. Er hat so nun mehr als ausreichend Leistung um das Gimbal zu tragen. Ich habe auch alles an Tuninghardware verbaut, was ich vorrätig hatte, aber der entscheidende Punkt bzgl. minimaler Vibrationen ware es, die Motoren sorgfältig zu wuchten. Das größte Problem des Koax ist sein Flugverhalten, vorallem die Windempfindlichkeit: Der Lama hat genug Leistung um gegen den Wind anzukommen, aber er fängt dann stark das Wobbeln an.
Ergebnisse
Einige Ergebnisse habe ich an verschiedenen Stellen vorgestellt:
Artikel:
Brushless Gimbal Direct Drive: Theory and Experiment
Mini Brushless Gimbal Controller
Threads:
Micro Brushless Gimbal – HILFE (@ FPV-Community)
Youtube Videos:
Micro Brushless Gimbal: 2nd step towards it
Micro Brushless Gimbal: Understanding better the dynamics of brushless direct drive
Micro Brushless Gimbal: 2-Axis Gimbal with KeyCam #16 V2
Micro Brushless Gimbal with oBGC Firmware: It’s flying 🙂
Micro Brushless Gimbal on a Coax Heli
(einige weitere Videos zum Thema sind in meinem Youtube-Kanal Olliw42 zu finden)
7 Kommentare