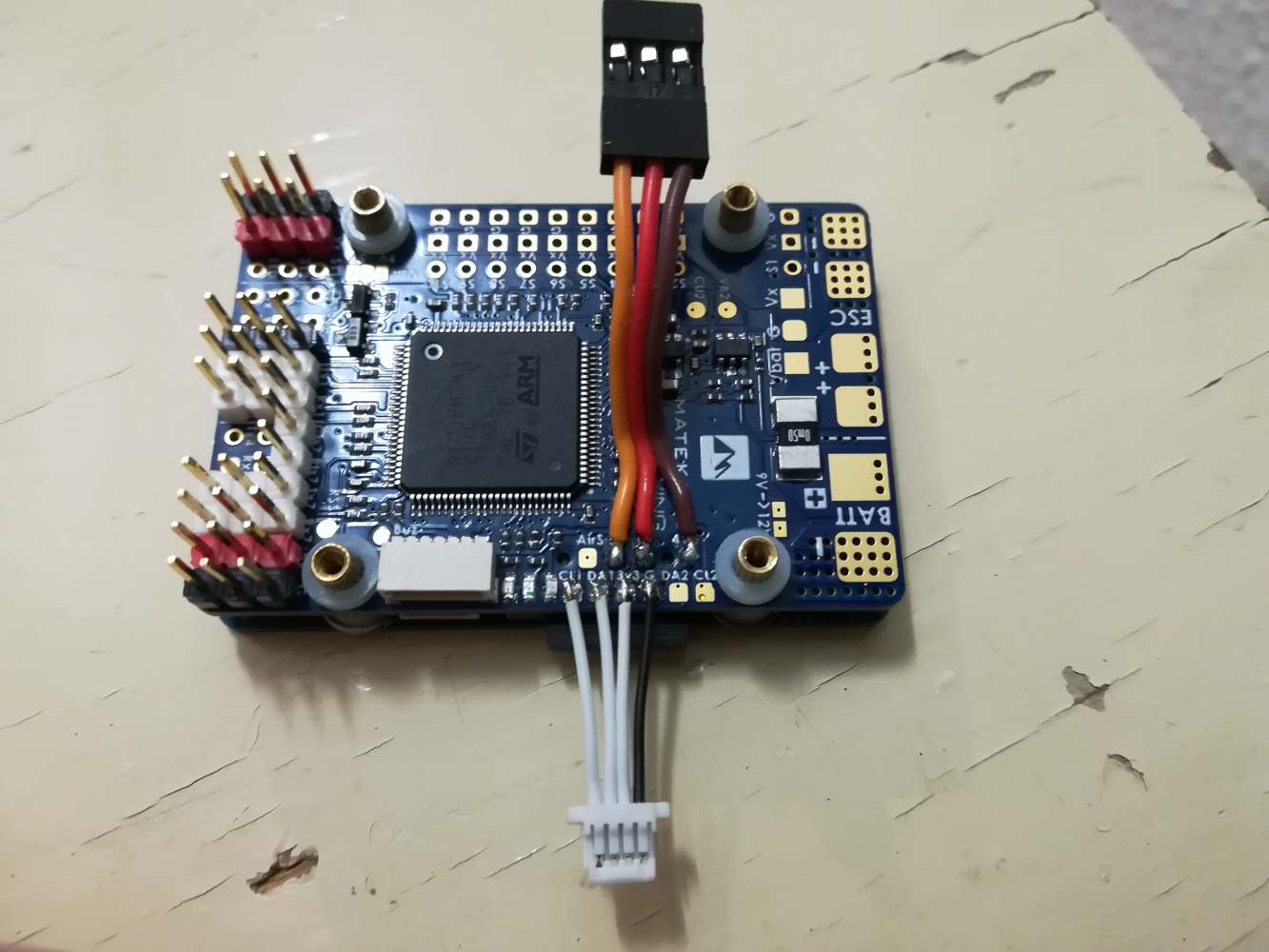
Recently I bought me a Matek H743 Wing flight controller, in order to replace my beloved, trusted, but now somewhat rusted AUAV-X2 flight controller, which has been the brain of my copter for many years.
I was a bit skeptical at first, but in my opinion the H743 is indeed the best current ArduPilot flight controller which satisfies this set of criteria:
H7 processor, CAN bus, cheap, good
It is not perfect, but I don’t regret having bought it at all, and it will stay in my copter.
CAN bus is important to me. I’m using it since many years in my copter (see UC4H: UAVCAN for Hobbyists). So, the replacement flight controller had to have CAN bus, which in fact really narrowed down the available options, if one doesn’t want to spend lots of money. The Matek H743 Wing is one of the very few affordable options if CAN bus is desired.
In the meantime also the Matek H743 Slim and Matek H743 Mini boards have become available, which are based on the same electrical design and scheme. They may have their place, I’m sure, but I don’t see any benefit they would offer for copter applications. So, the Matek H743 Wing remains to be the right choice for me. I got me a Matek H743 Slim however – as development platform.
Review
My impressions on the Matek H743 Wing:
CAN Bus 101
CAN bus is not a new technology, and it is and has been used also in the drone world since long. I also use it since several years in my ArduPilot-driven copter, but I guess it’s fair to say that CAN bus is still somewhat „new“ in the ArduPilot world. So, I’ve made this video discussing the pro and cons of CAN bus for our hobby, and also giving some relevant technical details.
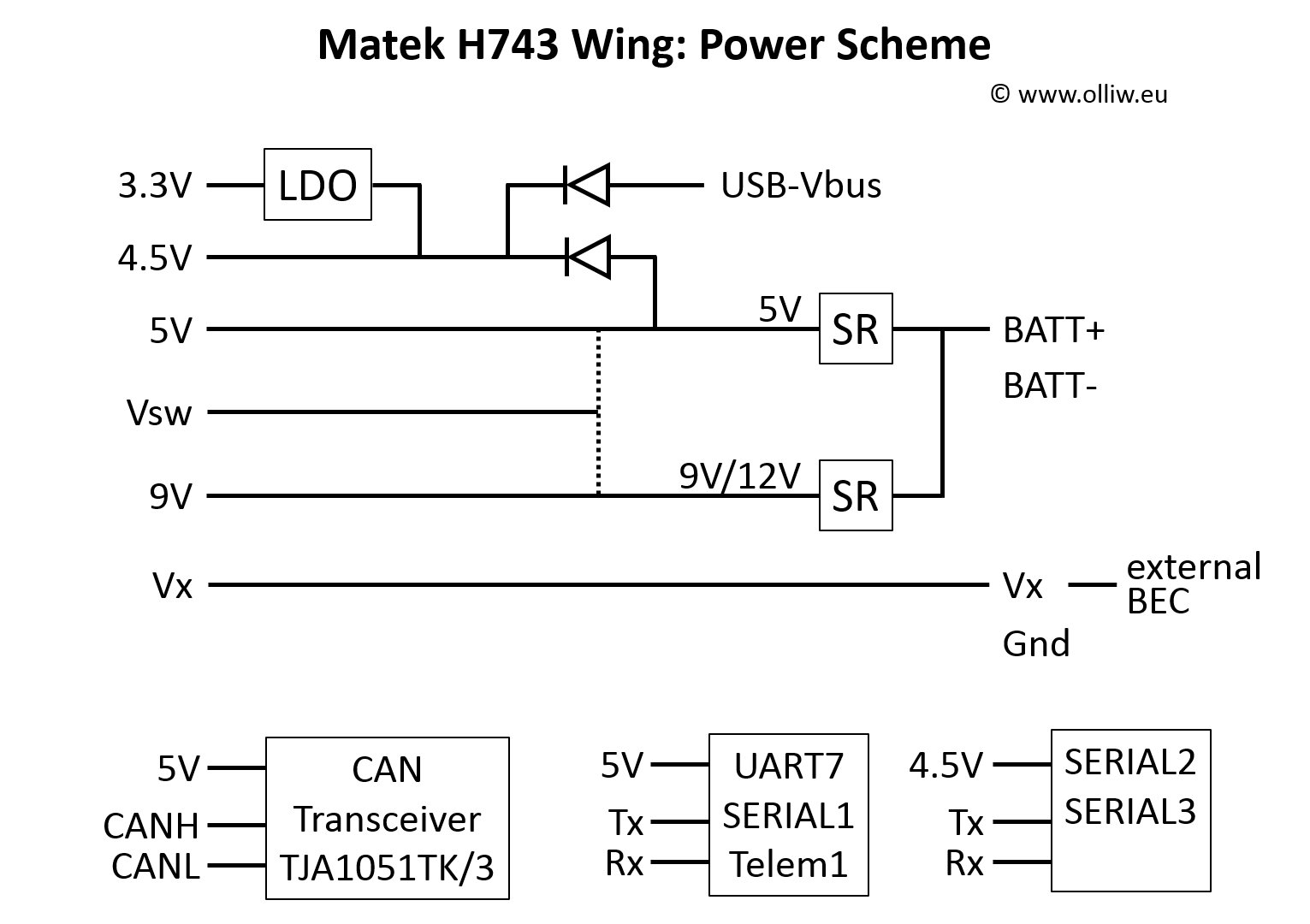
Power Scheme
It is useful to know the power scheme used by the Matek H743 Wing. So, I produced this:
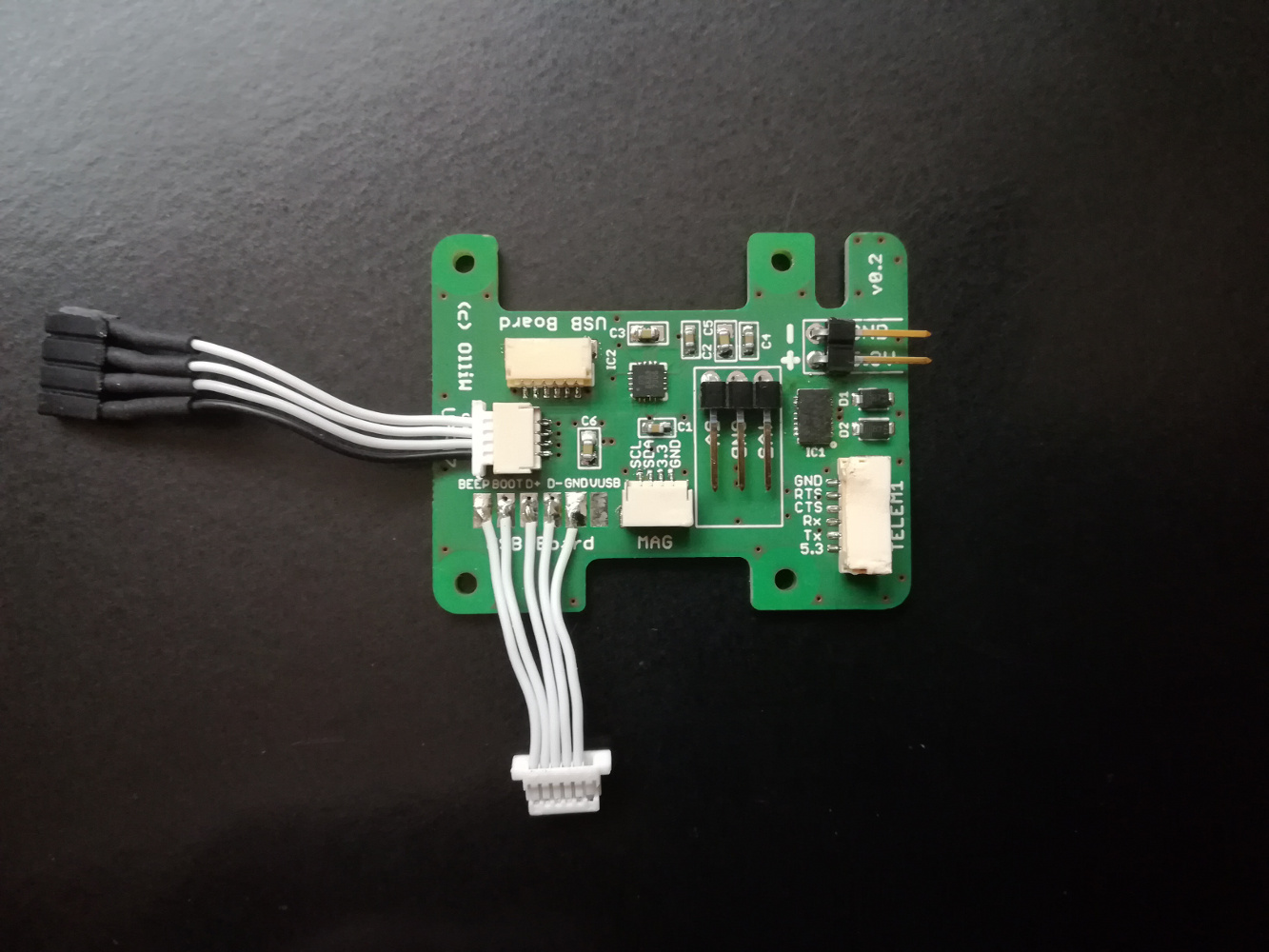
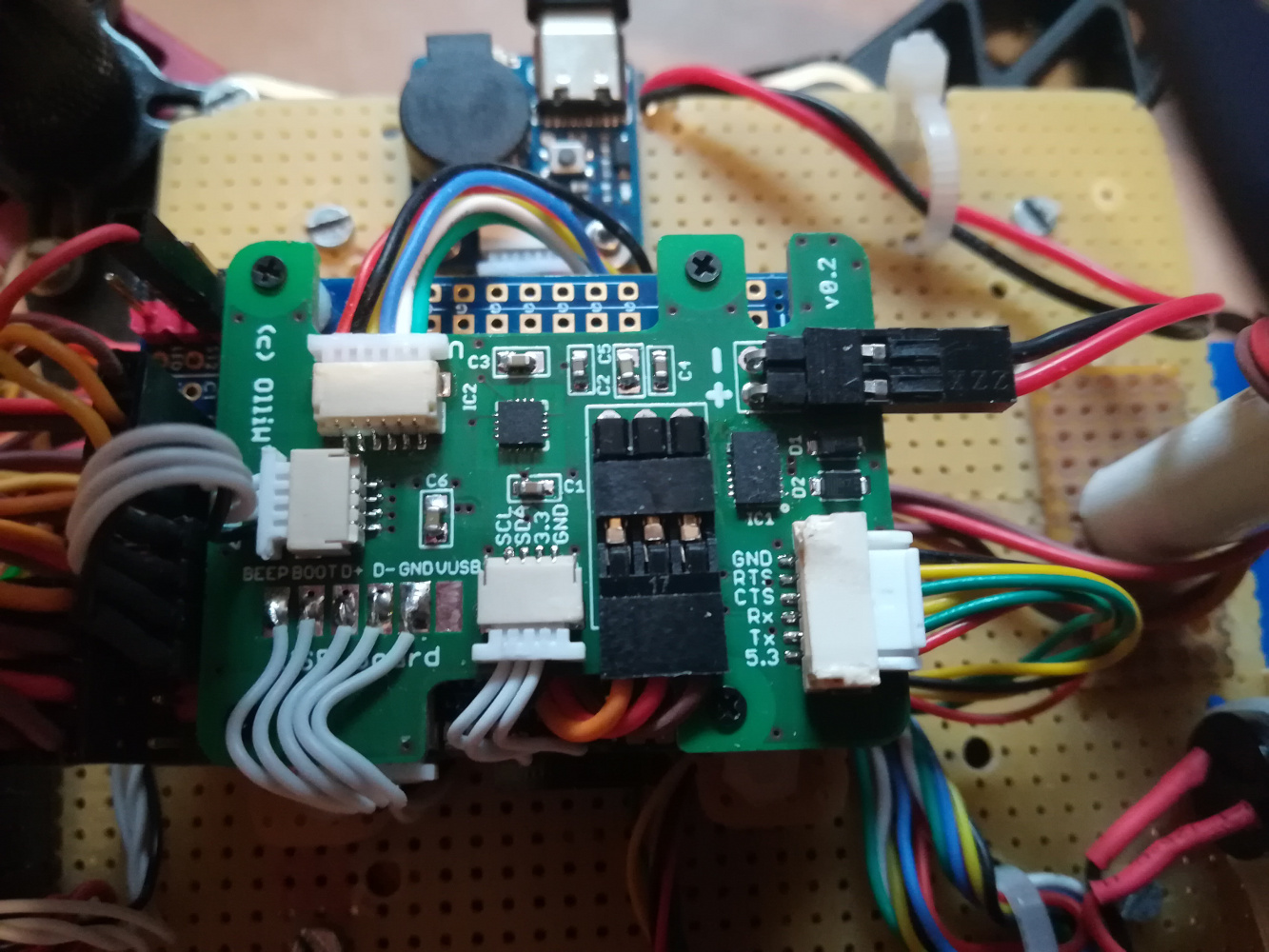
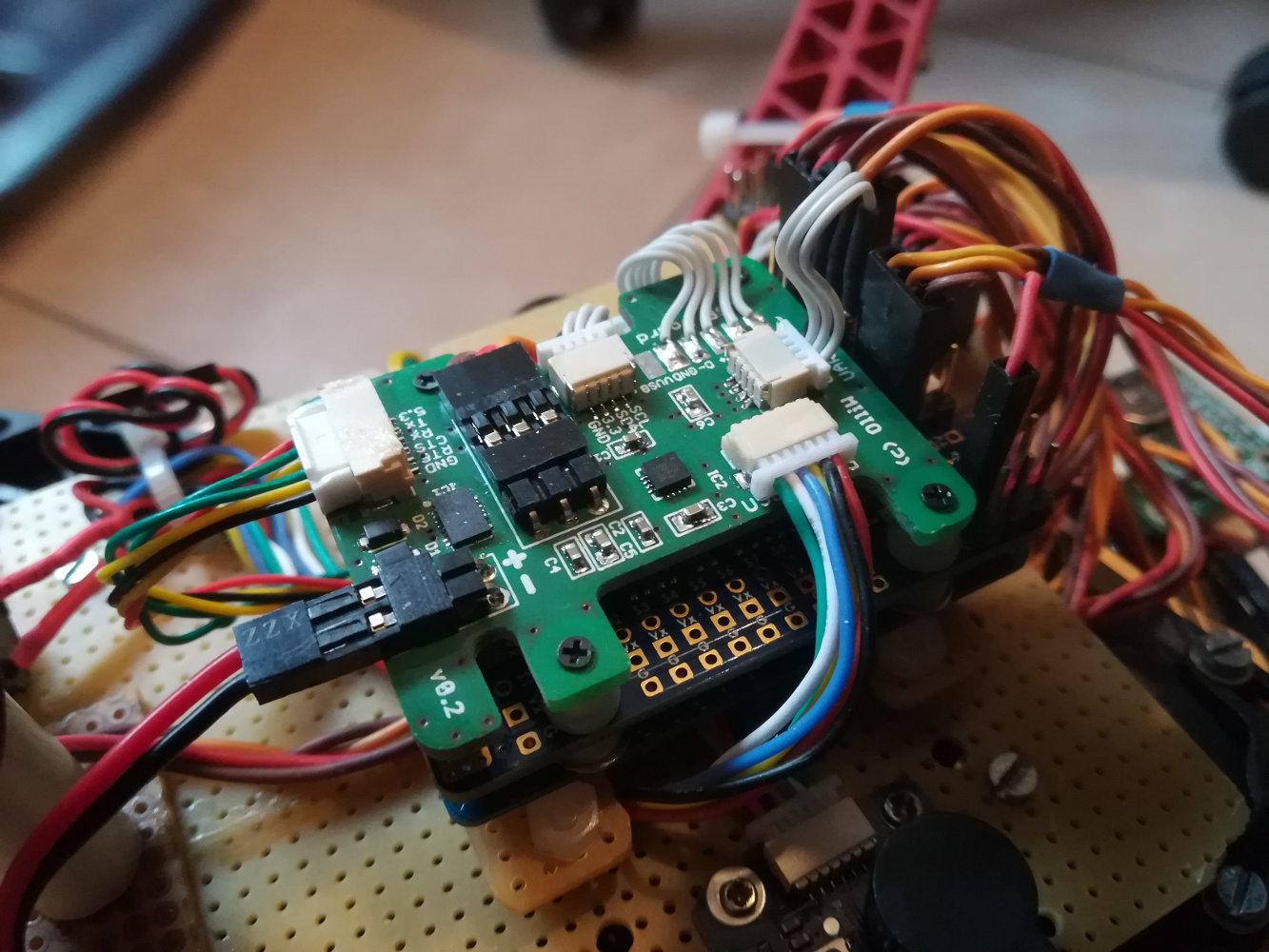
Cape PCB
As said before, I really like the Matek H743 Wing, but – at least for copter applications – it has IMHO some disadvantages, as I discussed in the above video. So I designed a cape, which replaces the top BEC board, which I am not using anyhow, and which solves these points for me:
- On-board magnetometer: I really miss that, so I had added a compass module, but I didn’t like the complexity in wiring which this resulted in. So the hat now carries a QMC5883. I’d like to use a LIS3MDL, but I didn’t had them at home and they are out of stock at mouser currently. So it became the QMC5883. Good enough.
- CAN bus power: The CAN bus is not powered then the board/vehicle is powered via the usb plug. I find that pretty annoying.
- TELEM1 power & connector: I didn’t like having to use a big, fat, 6-pin header for connecting to the TELEM1 unit (which is a 3DR SiK radio in my case). So I added a standard DroneCode 6-pin JST-GH connector, and added a proper power distribution using ideal diodes for the or-ing.
With the cape it is now much more compact and compatible. So, I like it LOL.